WinCUPL
前稿でMCSの導出はブール則による論理圧縮であることを説明しました。論理圧縮ツールの具体例として、WinCUPLというツールをご紹介します。これは大学で開発されたCUPLというPLDのプログラミングツールをAtmelがWindows用に移植したもので、無料で使用可能です。
PLDプログラミング機能のうちのlogic minimization(論理圧縮)機能を使用します。論理圧縮とは、入力された複雑なブール式をespresso法等で簡略化するもので、本稿ではFTAのMinimal Cut Setを導出するために流用します。
PMHF値の算出
実際にWinCUPLにより論理圧縮を実施し、MCSを求め、PMHF値を算出してみましょう。PMHFとは、車両寿命間での故障確率(正確には平均不稼働確率)を求め、車両寿命で割った平均故障率(正確には平均不稼働率)を意味します。ただしこの場合、DPFは小さいため無視するものとします。FTA(1)でご紹介したFTを対象とします。さらに基事象の故障確率は以下の表で与えられるものとし、車両寿命を$10^5$[H](10万時間)として確率を計算します。
表24.1
| 基事象ID |
故障率[FIT] |
| e1 |
8.74 |
| e2 |
1.80 |
| e3 |
1.53 |
| e4 |
5.08 |
| e5 |
9.69 |
| e6 |
5.36 |
| e7 |
8.22 |
| e8 |
6.23 |
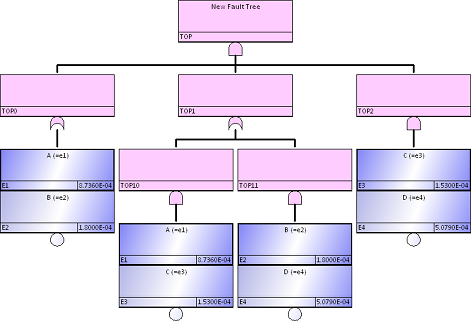
手順としてはまず、このFTをWinCUPLにより簡単化します。
FTA(1)でご紹介したFTをCUPLの入力論理式で記述すると、以下のようになります。
Name MinimalCutSet;
PartNo 00 ;
Date 2016/03/28 ;
Revision 01 ;
Designer Engineer ;
Company FS Micro Corporation;
Assembly None ;
Location ;
Device ;
/* *************** INPUT PINS *********************/
Pin [10..18] = [e1..e8];
/* *************** OUTPUT PINS *********************/
Pin 1 = top;
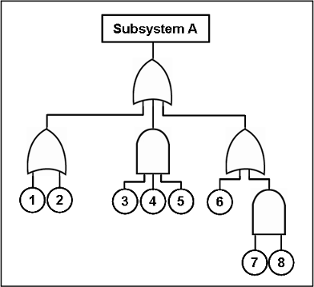
top = (e1 # e2) # (e3 & e4 & e5) # (e6 # (e7 & e8));
図24.1
WinCUPLによる論理圧縮
前述の入力をWinCUPLで処理すると、以下のようなドキュメントが出力されます。
*******************************************************************************
MinimalCutSet
*******************************************************************************
CUPL(WM) 5.0a Serial# 60008009
Device virtual Library DLIB-h-40-1
Created Tue Mar 29 09:37:27 2016
Name Minimal Cut Set
Partno 00
Revision 01
Date 2016/03/28
Designer Engineer
Company FS Micro Corporation
Assembly None
Location
===============================================================================
Expanded Product Terms
===============================================================================
top =>
e3 & e4 & e5
# e7 & e8
# e6
# e2
# e1
(省略)
図24.2
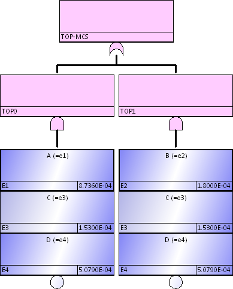
ここで、上記論理式は、{{e1}, {e2}, {e6}, {e7, e8}, {e3, e4, e5}}というMCSを意味します。従って、TOP事象侵害確率をレアイベント近似で求める場合、
FTA(2)で見たように(21.2)で求められます。
\[
P\{TOP\}\approx P\{e_1\}+P\{e_2\}+P\{e_3\}P\{e_4\}P\{e_5\}+P\{e_6\}+P\{e_7\}P\{e_8\}\tag{24.1}
\]
これらの基事故障率に基づいて、車両寿命を$10^5$[H]とした場合の「Exponential1次近似」を用い、さらにレアイベント近似を用いた計算を行うと、
0.000874+0.00018+0.000153*0.000508*0.000969+0.000536+0.000822*0.000623=1.591e-03
図24.3
となります。PMHFは故障率の次元を持つので上記確率を車両寿命$10^5[H]$で割ると、PMHF=$1.591\cdot 10^{-8}=15.91$[FIT]と求められます。
SAPHIREによる計算
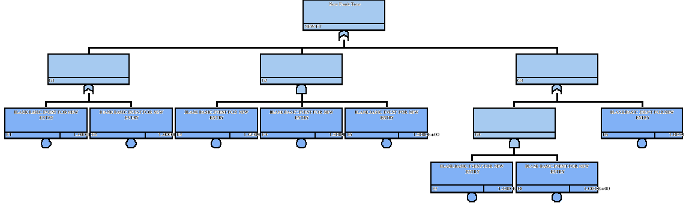
SAPHIREではMCS導出とTOP事象侵害確率計算まで自動で可能です。この結果を次図に示します。
 図24.4 MCS図
図24.4 MCS図
SAPHIREでも同じく{{e1}, {e2}, {e6}, {e7, e8}, {e3, e4, e5}}というMCSが取得できました。また、TOP事象確率は$1.590\cdot 10^{-3}$と手計算と比較して若干小さい結果となりました。同様に上記確率を車両寿命$10^5[H]$で割れば、PMHF=$1.590\cdot 10^{-8}=15.9$[FIT]となります。手計算の結果のほうが若干大きいのは、レアイベント近似によるダブルカウントのためと考えられます。
 前のブログ
次のブログ
前のブログ
次のブログ